Application Note
InvenSense Motion Sensor Universal
Evaluation Board (UEVB) User Guide
PURPOSE
This document describes the hardware and circuitry on the Universal Evaluation Board (UEVB). The UEVB is used to
evaluate most of InvenSense’s current motion sensing (gyroscopes, accelerometers, magnetometers) products. It
covers applying the UEVB to a larger system, and requires the understanding of key signals and circuit functions,
hardware jumper settings, and port connections.
USAGE
This UEVB provides up to nine axes of motion sensing comprised of:
•
•
•
•
•
Digital-output of 3-axis gyroscope with user-programmable full-scale ranges
Digital-output of 3-axis accelerometer with user-programmable full-scale ranges
Digital-output of 3-axis magnetometer
On-chip temperature sensor
Data is measured using on-chip ADCs and is transmitted over I²C or SPI interfaces
The UEVB may be used by itself utilizing SPI or I²C serial communications interfaces. Alternatively, it may be
connected to the InvenSense ARM Controller Board for connectivity to a host computer via USB interface.
The UEVB was designed to support up to 9-axis MPUs (Motion Processing Units) with a built-in compass (MPU91xx and MPU-92xx). Connecting an external compass board to the UEVB may require the user to connect their
third-party compass to the UEVB via its auxiliary I2C bus. The UEVB is populated with an external compass, and can
access the main or auxiliary I2C bus lines provided by the sensor (AUX_DA and AUX_CL) via resistor options.
The UEVB is lead-free and RoHS compliant.
RELATED DOCUMENTS
Please refer to the product specification of the main motion sensor for electrical characteristics, pinout and
applications details. Sensor product specifications can be found at www.invensense.com. For product specifications
for unreleased parts, please contact the InvenSense sales department at sales@invensense.com.
InvenSense reserves the right to change the
detail specifications as may be required to
permit improvements in the design of its
products.
InvenSense Inc.
1745 Technology Drive, San Jose, CA 95110 U.S.A
+1(408) 988–7339
www.invensense.com
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.3
Rev Date: 02/24/2016
�UEVB
TABLE OF CONTENTS
PURPOSE ..................................................................................................................................................... 1
USAGE ...................................................................................................................................................... 1
RELATED DOCUMENTS .......................................................................................................................... 1
UEVB OVERVIEW ........................................................................................................................................ 3
TABLE 1A. PARTS FOR UEVB FOOTPRINTS ........................................................................................ 3
TABLE 1B. RESISTOR OPTIONS ............................................................................................................ 5
KEY FUNCTIONS AND PINOUTS ............................................................................................................ 7
I2C/SPI BUS CONNECTIONS ................................................................................................................... 7
SCHEMATIC ................................................................................................................................................. 8
BILL OF MATERIAL (BOM) .......................................................................................................................... 9
TABLE 2A. BILL OF MATERIAL FOR U1A (e.g. with MPU-92XX)........................................................... 9
TABLE 2B. BILL OF MATERIAL FOR U1B (e.g. with ITG-35XX)............................................................. 9
TABLE 2C. BILL OF MATERIAL FOR U1C (e.g. with ITG-1010) ........................................................... 10
TABLE 2D. BILL OF MATERIAL FOR U1D, OPTION-A (e.g. with MPU-60XX)..................................... 10
TABLE 2E. BILL OF MATERIAL FOR U1D, OPTION-B (e.g. with MPU-91XX) ..................................... 11
POWER SUPPLY CONNECTIONS............................................................................................................ 12
TABLE 3. POWER SELECTION JUMPERS (JP1, JP2) ......................................................................... 12
UEVB CONNECTOR SIGNALS DESCRIPTION ........................................................................................ 13
TABLE 4. USER INTERFACE CONNECTOR SIGNALS (CN1) ............................................................. 13
CONNECTING THE FSYNC LINE .......................................................................................................... 14
SERIAL BUS LEVELS, SPEEDS, AND TERMINATIONS ...................................................................... 14
DATA GATHERING OPTIONS ................................................................................................................... 15
CONNECTION TO THE INVENSENSE ARM CONTROLLER BOARD ................................................. 15
USE OF THE UEVB WITHOUT AN ARM CONTROLLER BOARD........................................................ 15
SPECIAL INSTRUCTIONS ......................................................................................................................... 16
ELECTROSTATIC DISCHARGE SENSITIVITY ..................................................................................... 16
BOARD LAYOUT AND FOOTPRINT DISCUSSION .............................................................................. 16
REVISION HISTORY .............................................................................................................................. 18
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.3
Rev Date: 02/24/2017
Page 2 of 19
�UEVB
UEVB OVERVIEW
The UEVB hosts most of InvenSense’s motion sensors and MPUs. To support a number of different products with
the UEVB, resistor options were implemented for easy and flexible circuit configurations. For example, Table 1a
shows the most popular parts that fit on the UEVB. Table 1b lists the resistor options for different configurations.
TABLE 1A. PARTS FOR UEVB FOOTPRINTS
UEVB
IDENTIFIER
PART
NUMBER
ITG-3400
MPU-5400
MPU-65xx
MPU-68xx
U1A
U1B
U1C
U1D
MPU-92xx
PACKAGE TYPE
& DIMENSIONS
PIN
COUNT
3-axis gyro
3- axis gyro,
2-axis accel (X, Y)
6-axis (accel, gyro)
QFN, 3 x 3 x 0.9 mm
24
QFN, 3 x 3 x 0.9 mm
24
QFN, 3 x 3 x 0.9 mm
24
6-axis (accel, gyro)
9-axis (accel, gyro,
compass)
QFN, 3 x 3x 0.9 mm
24
QFN, 3 x 3 x 1 mm
24
SENSOR TYPE
FEATURES
AKM
compass
ICM-103xx
3-axis accel
QFN, 3 x 3 x 0.9 mm
24
(Most of)
ICM-206xx
6-axis (accel, gyro)
QFN, 3 X 3 X 0.75 mm
24
ICM-209xx*
9-axis (accel, gyro,
compass)
AKM
compass
LGA, 3 x 3 x 1 mm
24
IDG-20xx
2-axis gyro (X, Y)
OIS
QFN, 3 x 3 x 0.75 mm
16
IXZ-20xx
2-axis gyro (X, Z)
OIS
QFN, 3 x 3 x 0.75 mm
16
IDG-25xx
(Most of)
IXZ-25xx
ITG-35xx
2-axis gyro (X, Y)
QFN, 3 x 3 x 0.9 mm
16
2-axis gyro (X, Z)
QFN, 3 x 3 x 0.9 mm
16
3-axis gyro
16
ITG-352x
3-axis gyro
OIS
16
ITG-3701
3-axis gyro
OIS
QFN, 3 x 3 x 0.9 mm
QFN, 3 x 3 x 0.9 mm
QFN, 3 x 3 x 0.75 mm
QFN, 3 x 3 x 0.75 mm
ITG-358x
3-axis gyro
Custom
QFN, 3 x 3 x 0.9 mm
16
16
ITG-1010
3-axis gyro
QFN, 3 x 3 x 0.9 mm
16
ISZ-2510
1-axis gyro (Z)
QFN, 3 x 3 x 0.9 mm
16
IXZ-2510
2-axis gyro (X, Z)
QFN, 3 x 3 x 0.9 mm
16
ICM-20608
6-axis (accel, gyro)
QFN, 3 x 3 x 0.75 mm
16
ICG-20660
6-axis (accel, gyro)
QFN, 3 x 3 x 0.75 mm
16
IAM-20680
6-axis (accel,gyro)
LGA, 3 X 3 X 0.75mm
16
IAM-20380
3-axis (accel)
LGA, 3 X 3 X 0.75mm
16
IMU-30xx
3-axis gyro
QFN, 4 x 4 x 0.9 mm
24
MPU-30xx
3-axis gyro
QFN, 4 x 4 x 0.9 mm
24
MPU-33xx
3-axis gyro
QFN, 4 x 4 x 0.9 mm
24
MPU-60xx
6-axis (accel, gyro)
QFN, 4x 4 x 0.9 mm
24
MPU-615x
6-axis (accel, gyro)
QFN, 4 x 4 x 0.9mm
24
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.3
Rev Date: 02/24/2017
Page 3 of 19
�UEVB
MPU-91xx
9-axis (accel, gyro,
compass)
* Future Product. Contact InvenSense Sales for availability.
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.3
Rev Date: 02/24/2017
Page 4 of 19
LGA, 4 x 4 x 1 mm
24
�UEVB
TABLE 1B. RESISTOR OPTIONS
R18 = 1kΩ (or Open)
𝐂𝐂𝐂𝐂/V_LOGIC Pin Resistor
Option for All Footprints
Functions as CS
R22 = 0 Ω
R18 = 0 Ω
Functions as
V_LOGIC
R22 = Open
R1, R3, R5, R7 = 0 Ω
Reserved
R2, R4, R6, R8 = Open
U1A Resistor
Option
MPU-92xx and other QFN24,
3 x 3 x 1 mm parts
R1, R3, R5, R7 = Open
R2, R4, R6, R8 = 0 Ω
R19 = 10 kΩ
Pin 15 = High
R20 = Open
U1D Resistor
Option
R19 = Open
Pin 15 = Low
R20 = 10 kΩ
R11, R13 = 0 Ω
2
Connects U2 to primary I C bus
R12, R14 = Open
U2 Resistor
Option
Connects U2 to U1's auxiliary I2C
bus (if available)
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.3
Rev Date: 02/24/2017
Page 5 of 19
R11, R13 = Open
R12, R14 = 0 Ω
�UEVB
17
1
16
2
15
3
5
14
4
6
13
5
2
13
14
19
20
21
22
23
24
12
18
17
U1D
QFN/LGA24
4 x 4 mm
10
4
9
5
14
6
13
Figure 1C: U1C (QFN/LGA16_3x3 mm)
16
15
12
11
3
10
11
8
7
6
5
1
9
4
13
8
3
U1C
QFN/LGA16
3 x 3 mm
10
9
7
2
11
Figure 1B: U1B (QFN/LGA16_3x3 mm)
14
15
16
Figure 1A: U1A (QFN/LGA24_3x3 mm)
1
U1B
QFN/LGA16
3 x 3 mm
12
11
10
9
7
4
8
U1A
QFN/LGA24
3 x 3 mm
3
12
8
2
7
18
6
1
15
16
19
20
21
22
23
24
There are four different footprints on the UEVB PCB (Figures 1A, 1B, 1C and 1D) to fit various motion sensors, but
only one may be populated at a time.
Figure 1D: U1D (QFN/LGA24_4x4 mm)
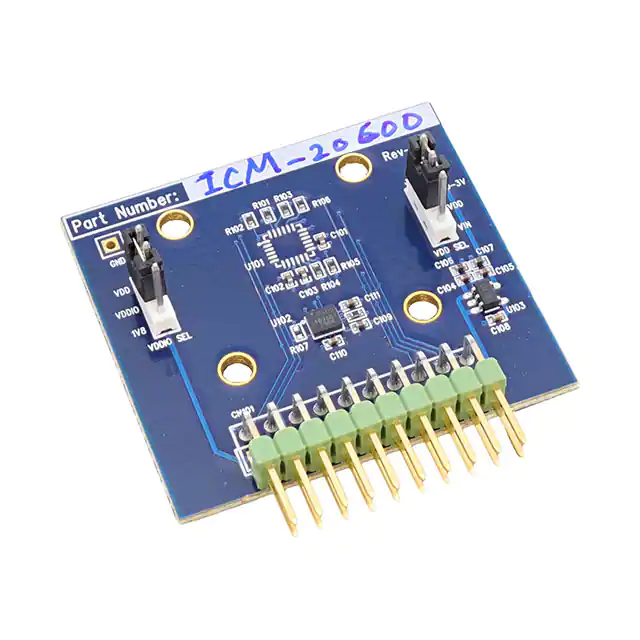
The UEVB is populated with components only on its top side (Figure 2) to achieve ease of measurement access. A 10
x 2 connector (CN1) is designed to interface with the InvenSense ARM Controller Board, which is a host
microcontroller board useful for programming the registers of the sensor on the UEVB and accessing sensor data via
a PC or laptop through the USB port.
A 3-pin power selection header (JP1) is provided to choose the voltage level for VDD. Similarly, a 3-pin VDDIO
selection header (JP2) allows the user to select the power source for the board’s/sensor’s digital I/O voltage.
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 6 of 19
�UEVB
KEY FUNCTIONS AND PINOUTS
The motion sensing UEVB is a fully assembled and tested evaluation board, allowing for simple and swift
evaluation of the device’s X-/Y-/Z-axis angular rate gyroscope, X-/Y-/Z-axis accelerometer, and X-/Y-/Z-axis
compass. The motion sensing device has a primary interface to talk to the application processor and a secondary
interface that allows a user to communicate with an external sensor, such as a pressure sensor or compass.
The motion sensing device utilizes InvenSense’s proprietary MEMS technology with driven vibrating masses to
produce a functionally complete, low-cost motion sensor. The motion processing unit incorporates X-/Y-/Z-axis
low-pass filters and an EEPROM for on-chip factory calibration of the sensor. Factory-trimmed scale factors
eliminate the need for external active components and end-user calibration. A built-in Proportional-To-AbsoluteTemperature (PTAT) sensor provides temperature compensation information. Refer to the product specification
document for each sensor to obtain more details on specific sensor features.
I2C/SPI BUS CONNECTIONS
The UEVB communicates with a system processor (e.g. InvenSense ARM controller board) through the custom
header using either the I²C or the SPI serial interface. The device always acts as a slave when communicating with
the system processor.
Figure 2. Top Side of the UEVB (e.g. MPU-65xx)
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 7 of 19
�UEVB
SCHEMATIC
Figure 3. UEVB Circuit Schematic
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 8 of 19
�UEVB
BILL OF MATERIAL (BOM)
The UEVB offers five different BOMs, which cover most of InvenSense’s sensor (Tables 2A, 2B, 2C, 2D, and 2E.)
There are two BOM versions for U1D, and one each one for U1A, U1B and U1C.
TABLE 2A. BILL OF MATERIAL FOR U1A (e.g. with MPU-92XX)
ITEM
QUANTITY
REFERENCE
PART
Header 10 x 2, M,
90D, 2.54 x 2.54 mm
PCB FOOTPRINT
1
1
2
16
3
1
C1, C2, C3, C4, C5, C6, C7, C8, C9, C11, C12,
C13, C14, C18, C19, C20
C10
0.1 µF
C0402
2200 pF
C0402
4
5
2
1
C15, C17
C16
2.2 µF
0.033 µF
3-Pin Header, 2.54 x
2.54 mm, Male
10 kΩ
C0402
C0402
7
2
JP1, JP2
9
8
R9, R10, R15, R19, R21, R23, R24, R25
R0402
10
7
R1, R3, R5, R7, R11, R13, R22
0Ω
R0402
11
13
17
1
1
1
R18
U1A
U2
1 kΩ
MPU-92xx
AK8963C
R0402
QFN24_3x3 mm
BGA14_2X2 mm
18
1
U4
XC6210B302MR-G
SOT25
CN1
HDB2X14NRA
SIP-3P
TABLE 2B. BILL OF MATERIAL FOR U1B (e.g. with ITG-35XX)
ITEM
QUANTITY
REFERENCE
1
1
2
16
3
4
5
1
2
1
C1, C2, C3, C4, C5, C6, C7, C8, C9, C11,
C12, C13, C14, C18, C19, C20
C10
C15, C17
C16
7
2
JP1, JP2
9
10
8
3
11
CN1
PART
Header 10x2, M, 90D,
2.54 x 2.54 mm
PCB FOOTPRINT
HDB2X14NRA
0.1 µF
C0402
C0402
C0402
C0402
R9, R10, R15, R19, R21, R23, R24, R25
R11, R13, R22
2200 pF
2.2 µF
0.033 µF
3-Pin Header, 2.54 x
2.54 mm, Male
10 kΩ
0Ω
1
R18
1 kΩ
14
1
U1B
ITG-35xx
17
1
U2
AK8963C
18
1
U4
XC6210B302MR-G
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 9 of 19
SIP-3P
R0402
R0402
R0402
QFN16_3X3
(0.5 Pitch)A
BGA14_2X2
(0.4 Pitch)
SOT25
�UEVB
TABLE 2C. BILL OF MATERIAL FOR U1C (e.g. with ITG-1010)
ITEM
QUANTITY
REFERENCE
PART
Header 10x2, M, 90D,
2.54 x 2.54 mm
PCB FOOTPRINT
1
1
CN1
HDB2X14NRA
2
16
C1,C2,C3,C4,C5,C6,C7,C8,C9,C11,
C12,C13,C14,C18,C19,C20
0.1 µF
C0402
3
1
C10
2200 pF
C0402
4
2
C15,C17
2.2 µF
C0402
5
1
C16
C0402
7
2
JP1,JP2
9
8
R9,R10,R15,R19,R21,R23,R24,R25
0.033 µF
3-Pin Header, 2.54 x
2.54 mm, Male
10 kΩ
10
3
R11,R13,R22
0Ω
R0402
11
1
R18
1 kΩ
15
1
U1C
ITG-1010
17
1
U2
AK8963C
18
1
U4
YB1210ST25R300
R0402
QFN16_IT36_3X3
(0.5PITCH)A
BGA14_2X2
(0.4PITCH)
SOT235
SIP-3P
R0402
TABLE 2D. BILL OF MATERIAL FOR U1D, OPTION-A (e.g. with MPU-60XX)
ITEM
QUANTITY
REFERENCE
1
1
2
16
3
4
5
1
2
1
C1, C2, C3, C4, C5, C6, C7, C8, C9, C11,
C12, C13, C14, C18, C19, C20
C10
C15, C17
C16
7
2
JP1, JP2
9
10
11
16
17
18
8
3
1
1
1
1
R9, R10, R15, R19, R21, R23, R24, R25
R11, R13, R22
R18
U1D
U2
U4
CN1
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 10 of 19
PART
Header 10x2, M, 90D,
2.54 x 2.54 mm
PCB FOOTPRINT
HDB2X14NRA
0.1 µF
C0402
2200 pF
2.2 µF
0.033 µF
3-Pin Header, 2.54 x
2.54 mm, Male
10 kΩ
0Ω
1 kΩ
MPU-60xx
AK8963C
XC6210B302MR-G
C0402
C0402
C0402
SIP-3P
R0402
R0402
R0402
QFN24_4X4(0.5 Pitch)
BGA14_2X2(0.4Pitch)
SOT25
�UEVB
TABLE 2E. BILL OF MATERIAL FOR U1D, OPTION-B (e.g. with MPU-91XX)
ITEM
QUANTITY
REFERENCE
1
1
2
16
3
4
5
1
2
1
C1, C2, C3, C4, C5, C6, C7, C8, C9, C11,
C12, C13, C14, C18, C19, C20
C10
C15, C17
C16
7
2
JP1, JP2
9
10
11
16
17
6
5
1
1
1
18
1
CN1
PART
Header 10x2, M, 90D,
2.54 x 2.54 mm
PCB FOOTPRINT
HDB2X14NRA
0.1 µF
C0402
C0402
C0402
C0402
R9, R10, R15, R21, R24, R25
R11, R13, R20, R22, R23
R18
U1D
U2
2200 pF
2.2 µF
0.033 µF
3-Pin Header, 2.54 x
2.54 mm, Male
10 kΩ
0Ω
1 kΩ
MPU-91xx
AK8963C
U4
XC6210B302MR-G
SOT25
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 11 of 19
SIP-3P
R0402
R0402
R0402
QFN24_4X4(0.5 Pitch)
BGA14_2X2(0.4 Pitch)
�UEVB
POWER SUPPLY CONNECTIONS
JP1 and JP2 are 3-pin headers, which allow the user to select between an on-board LDO (Low-Voltage Dropout
Regulator, U4) and an external DC supply (VIN) to power the motion sensor. For details, please refer to Table 3.
TABLE 3. POWER SELECTION JUMPERS (JP1, JP2)
JP1 PIN NUMBER
1-2 Shunted
2-3 Shunted
JP2 PIN NUMBER
1-2 Shunted
2-3 Shunted
SIGNAL DESCRIPTION
VDD = 3V (from LDO, VIN > 3.1V, net name 3V0)
VDD = VIN (from an external source)
SIGNAL DESCRIPTION
VDDIO = VDD
VDDIO = 1.8V (from an external source, net name 1V8)
The on-board low-noise 3V LDO offers an output that is called 3V0 (Figure 3). Using this will ensure that the sensor
performance will meet data sheet specifications.
Selecting VIN to power the chip/board is generally done while designing and evaluating an embedded platform,
where the host processor and related electronics need full control over the motion processing chipset’s power
supply.
If a user intends to use the on-board 3V power source, an external VIN must be provided within the range of
3.1~6.0V to ensure the LDO works properly.
If the user provides a VIN power level of ≥3.6V, JP1 and JP2 must be shunted across pins 1-2, since the motion
sensors’ VDD and VDDIO operational ranges are ≤3.6V.
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 12 of 19
�UEVB
UEVB CONNECTOR SIGNALS DESCRIPTION
TABLE 4. USER INTERFACE CONNECTOR SIGNALS (CN1)
CN1 PIN
NUMBER
1
2, 4, 9, 12,
14, 16, 19,
25, 26, 27,
28
CN1 SIGNAL NAME
AUX_DA
N.C.
SIGNAL DESCRIPTION
AUX_DA. Auxiliary I C serial data signal.
2
N.C. Do not connect to these pins.
AUX_CL. Auxiliary I2C serial clock signal.
3
AUX_CL
5
1V8
6
DRDY
7
INT
INT. Interrupt output signal to controller.
8
Test Signal. Not used in I2C mode; used as chip-select pin in SPI mode.
10
CS
DRDY-CMP
11
TP0
Test Signal
13
VPP
Test Signal
15, 17
GND
GND. Ground connection.
18
REGOUT
REGOUT. Sensor’s on-chip regulator output.
20
SCL_SCLK
SCL/SCLK. I2C or SPI primary serial clock signal.
21
FSYNC
22
SDA_SDI
23
VIN
24
AD0_SDO
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
1V8 Power. Receive power from InvenSense ARM controller board or
an external source.
DRDY. Data ready and FIFO interrupt signals.
Compass (U2) DRDY. Compass data ready signal.
FSYNC. Frame synchronization input for camera applications.
SDA/MOSI. I²C primary data or SPI MOSI signal.
Power. Receive power from InvenSense ARM controller board or an
external source.
AD0/MISO. Lowest (LSB) address bit in I2C mode or SPI MISO signal in
SPI mode.
Page 13 of 19
�UEVB
CONNECTING THE FSYNC LINE
The FSYNC line is intended for use in a camera’s image-stabilization system. It is an input from the camera platform
to the UEVB, and is intended to synchronize the motion-sensor serial-bus transfer with the master timing set by
the camera system.
SERIAL BUS LEVELS, SPEEDS, AND TERMINATIONS
The UEVB supports I²C communications up to 400 kHz, or SPI communications up to 1MHz clock rates for writing.
In SPI mode, it can be operated at up to 20 MHz for reading. The I²C bus open-drain pull-up resistors (10 kΩ) are
connected to VDDIO.
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 14 of 19
�UEVB
DATA GATHERING OPTIONS
The motion sensor’s digital sensor data is available on the UEVB’s header CN1. Alternatively, for connectivity with
a host PC, an InvenSense ARM controller board may be used.
CONNECTION TO THE INVENSENSE ARM CONTROLLER BOARD
For communications via USB with a host computer, the UEVB can be connected to the InvenSense ARM controller
board. InvenSense provides a software tool to support the collection of sensor data through the UEVB/ARM
controller board combo connected to a PC/laptop via a USB port. Please refer to the InvenSense Data Logger (IDL)
Application Notes document for additional instructions on how to use the software to obtain sensor data. This
information can be provided by your local field team on an as-needed basis.
Figure 4 shows the connection of the UEVB to the InvenSense ARM controller board. Connections between the two
boards are made via header CN1 on the UEVB and connector JP6 on the InvenSense ARM Controller Board.
Figure 4. UEVB connected to the InvenSense ARM Controller Board
USE OF THE UEVB WITHOUT AN ARM CONTROLLER BOARD
I²C and SPI signals are made available on header CN1. Users may develop their own tools to communicate with the
UEVB as there is no bus mode selection setting required.
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 15 of 19
�UEVB
SPECIAL INSTRUCTIONS
ELECTROSTATIC DISCHARGE SENSITIVITY
The motion sensors can be permanently damaged by electrostatic discharge (ESD). ESD precautions for handling
and storage must be taken to avoid damage to the devices.
BOARD LAYOUT AND FOOTPRINT DISCUSSION
The UEVB is a 4-layer FR-4 PCB design with the dimensions: 38.1 x 38.1 x 1.6 mm (1500 x 1500 x 62 mil). See Figure
5 and Figure 6 for a detailed top and bottom view of the UEVB.
The MPU footprint on the UEVB supports both QFN and LGA packages. Footprints and sensor land patterns were
chosen large enough, so they offer ease of use, reliable contact with the sensor, hand-solder and debugging
capabilities for both packages.
Note that to avoid potential shorting/clearance issues at the corner pins for LGA packages, the land pattern shapes
for the individual pins in this design were chosen to be oblong rather than square. The dimensions for the pin pads
are 0.225 x 0.7 mm.
Solder mask (also called solder resist is a layer of protective coating for PCB’s copper traces, which helps to prevent
undesired solder bridges and shorts) dimensions will not be provided as they are dependent upon the manufacturing
process and the clearance capabilities of the chosen fabrication house. Contact your PCB vendor to determine the
minimum required clearance between pin pads (usually 4 mil to 6 mil or 0.102 mm to 0.152 mm) and traces allowing
them enough room to print an adequate solder mask.
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 16 of 19
�UEVB
Figure 5 & Figure 6.Top & Bottom View of the UEVB Board Layout
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 17 of 19
�UEVB
REVISION HISTORY
DATE
1/22/14
1/31/14
REVISION
1.0
1.1
11/7/14
1.2
02/24/17
1.3
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 18 of 19
DESCRIPTION
Initial Release
Updated parts list and BOM tables.
Updated parts list, corrected text
and updated references to existing
documentation listed in this user
guide.
Update parts list
�UEVB
This information furnished by InvenSense is believed to be accurate and reliable. However, no responsibility is assumed by InvenSense for its
use, or for any infringements of patents or other rights of third parties that may result from its use. Specifications are subject to change without
notice. InvenSense reserves the right to make changes to this product, including its circuits and software, in order to improve its design and/or
performance, without prior notice. InvenSense makes no warranties, neither expressed nor implied, regarding the information and
specifications contained in this document. InvenSense assumes no responsibility for any claims or damages arising from information contained
in this document, or from the use of products and services detailed therein. This includes, but is not limited to, claims or damages based on the
infringement of patents, copyrights, mask work and/or other intellectual property rights.
Certain intellectual property owned by InvenSense and described in this document is patent protected. No license is granted by implication or
otherwise under any patent or patent rights of InvenSense. This publication supersedes and replaces all information previously supplied.
Trademarks that are registered trademarks are the property of their respective companies. InvenSense sensors should not be used or sold in
the development, storage, production or utilization of any conventional or mass-destructive weapons or for any other weapons or life
threatening applications, as well as in any other life critical applications such as medical equipment, transportation, aerospace and nuclear
instruments, undersea equipment, power plant equipment, disaster prevention and crime prevention equipment.
©2014 InvenSense, Inc. All rights reserved. InvenSense, MotionTracking, MotionProcessing, MotionProcessor, MotionFusion, MotionApps,
DMP, AAR, and the InvenSense logo are trademarks of InvenSense, Inc. Other company and product names may be trademarks of the
respective companies with which they are associated.
.
©2014 InvenSense, Inc. All rights reserved.
Document Number: AN-IVS-0001EVB-00
Rev Number: 1.2
Rev Date: 11/07/2014
Page 19 of 19
�



 工商网监
湘ICP备2023018690号
工商网监
湘ICP备2023018690号
